
要求老虎机行动
- 使用机器人流程和自然语言理解 (NLU) 功能所需的所有架构师权限。有关详细信息,请参阅建筑师权限概述。
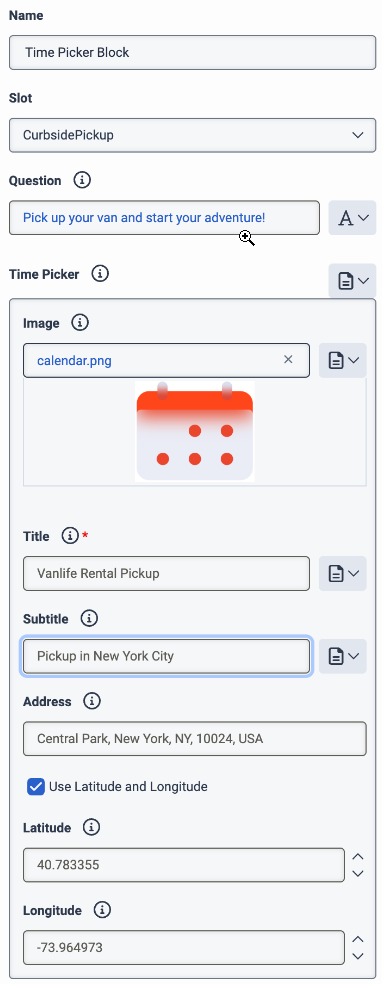
- 配置时间选择器时获取地理位置信息的以下权限:
- 地理位置>地理编码>拿来
Ask or Slot 操作可识别呼叫者或聊天接收者在话语中提及的插槽。 例如,考虑一下 “我的账号是 12345678” 的说法。 机器人识别出参与者的账号值为 12345678。
从 Architect 工具箱中的机器人流程的 “询问” 菜单访问此操作。
对于动态列表类型,您还可以使用表达式指定槽值表示方式。 例如:
MakeChooser(MakeQuickReplies(MakeList(MakePostbackChoice("pepperoni"), MakePostbackChoice("ham"), MakePostbackChoice("mushroom"))))
如果您有动态插槽,则必须更新并重新发布您的数字机器人流程。
| 姓名 | 描述 |
|---|---|
| 名称字段 | 为操作键入一个独特的名称。 您在此处输入的标签将成为流程结构中显示的操作名称。 |
| 槽位 |
选择预配置的插槽。根据所选的插槽类型,演示模板将切换到插槽值演示或时间选择器。 插槽在自然语言理解窗格中配置。有关详细信息,请参阅了解插槽和插槽类型。 |
| 问题 |
机器人在请求插槽时产生的通信。 |
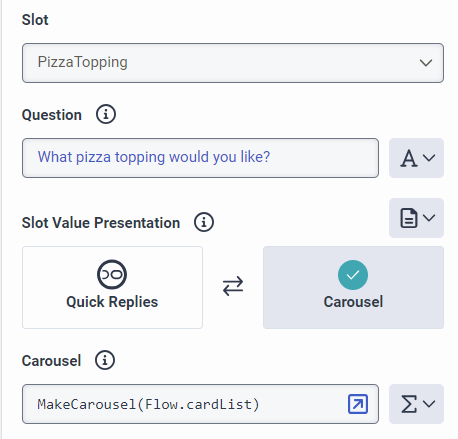
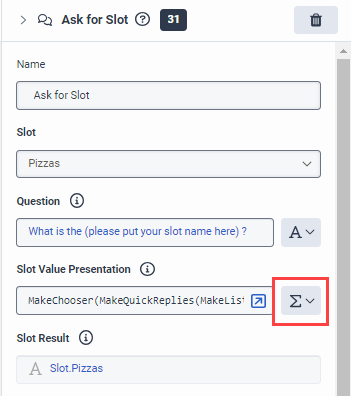
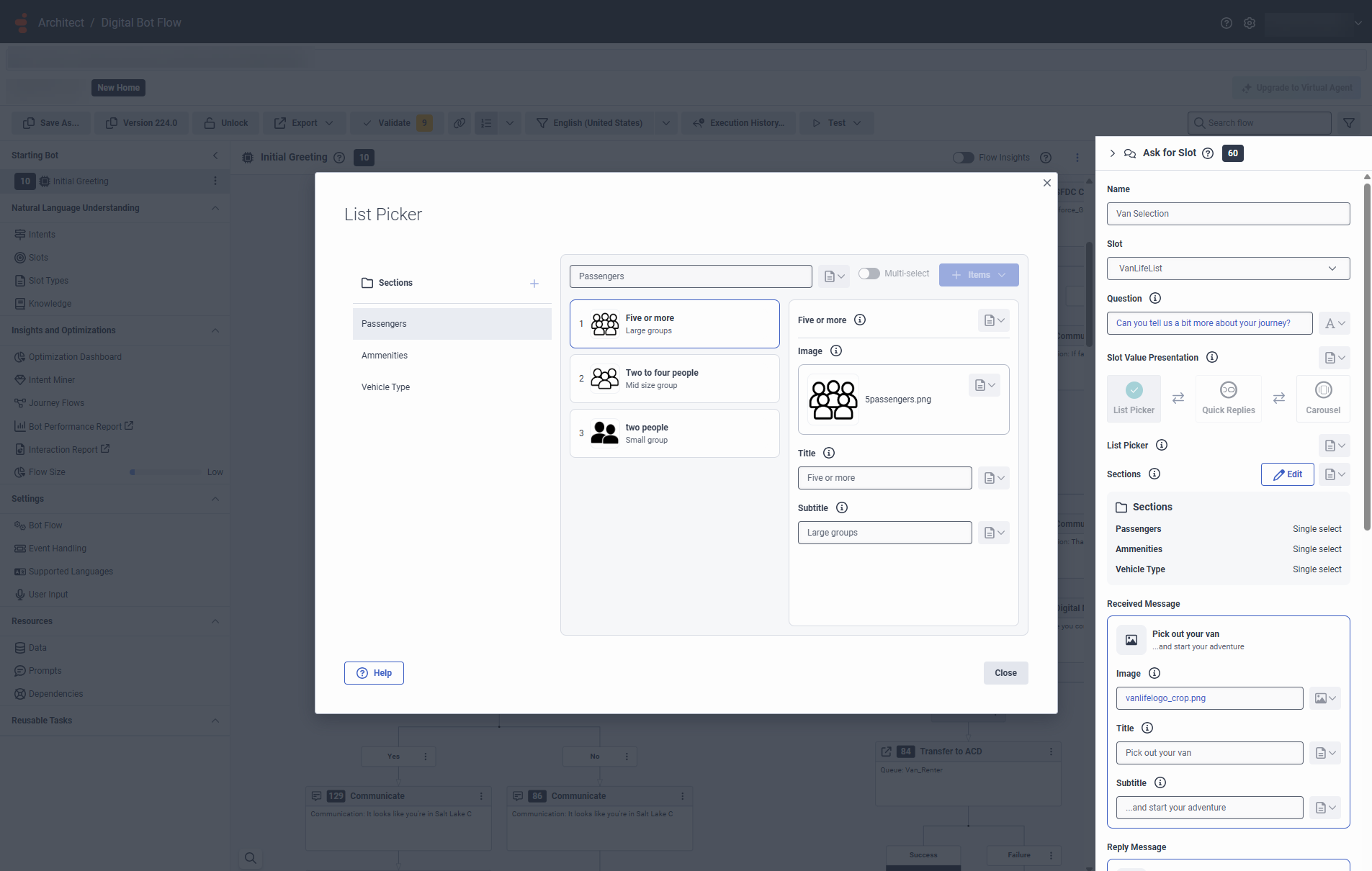
| 老虎机价值演示 |
列表选择器:选择此选项可以创建并发送项目列表供用户选择。例如,您可以发送列表选择器,以便用户从订单列表中选择一个或多个订单 ID。 |
|
快速回复: 选择此选项可为用户创建按钮,以指示他们接下来要做什么。 例如,预订酒店房间、联系酒店活动中心或收听用餐时间。 |
|
|
旋转木马: 选择此选项可创建带有图像、标题或描述的卡片,并为您的用户提供增强的视觉体验。 |
|
| 列表选择器 |
当您选择在“询问插槽”操作中使用列表选择器并选择一个插槽时,Architect 会使用所选插槽中配置的项目列表填充一个部分(默认)。您可以添加更多部分、删除部分以及自定义每个部分下的项目列表以满足您的需求。 要配置列表选择器,请执行以下步骤:
注释:
|
| 快速回复 |
当您选择在“询问插槽”操作中使用快速回复并选择一个插槽时,Architect 会为您填充快速回复。在快速回复卡中,您可以使用表达式来指定按钮类型、值和标签。例如:
注意:
|
| 旋转木马 |
每张卡片的旋转收藏必须至少包含一个项目,最多包含三个项目,每个旋转收藏必须包含 10 张卡片。Genesys 建议您使用 800 x 400 像素或类似像素的图像以获得最佳视觉效果。添加旋转木马卡片时,您可以使用表达式来添加图片、卡片标题和卡片描述。例如:
|
| 时间选择器 |
添加时间选择器时,您可以添加图像、标题、副标题和位置。
注意:
|
| 槽位结果 |
存储客户选择的值的变量。 如果客户未做出选择,则该值将保持为 “未指定” 值。 |
| 自定义验证 |
这个布尔表达式使您能够配置更多的验证逻辑。当流在运行时评估表达式时,流使用它来确定接收到的值是否满足这些附加要求。如果表达式计算结果为 false 或 NOT_SET 布尔值,则该值被视为无效。 |
| 继续提示 |
当 AI 驱动的插槽仅部分收集时,机器人会产生通信,提示用户提供进一步的输入。 |
| 提示 |
输入机器人在收到用户的部分输入时产生的通信。 笔记:在为机器人流程配置“请求插槽”操作时,捕获允许特殊字符的 AI 驱动插槽,例如 |
| 自定义继续提示 |
启用“继续重新提示”字段并使您能够创建继续提示列表。机器人在收到部分输入事件后会逐步返回这些提示。 笔记:您可以在“Continuation Reprompts”下配置最多 10 个提示。 |
| 无输入 |
输入机器人在不接收用户输入时产生的通信。 笔记: 数字机器人流未启用输入重新提示。 机器人返回您在设置>用户输入>未检测到输入>无输入道歉结合问题沟通。 |
| 自定义 “无输入” |
启用 “无输入重新提示” 字段,使您能够创建无输入提示的列表,机器人在未收到任何用户输入后会逐步返回这些提示。 |
| 不提示输入 |
机器人接收 No Input 后,它会在 No Input Repromps 集合中的位置返回通信,该位置对应于该操作当前收到的 “无输入” 数量。 例如,第一个 No Input 会触发机器人使用已定义集合中的第一个 No Input 重新提示符。 无输入重新提示集合的长度也会覆盖您在中定义的无输入重试的最大次数设置>用户输入>未检测到输入>无输入重试的最大次数对于该特定操作。 例如,如果您在集合中定义两个重新提示,机器人将重试两次。 空集合会关闭“无匹配”重试。 笔记:机器人返回你在设置>用户输入>未检测到匹配>不匹配道歉与 No Match 通信相结合。 |
| 默认为无输入 |
启用 “无输入” 字段,允许您定义机器人在未收到任何输入后返回的单个 “无输入” 提示。 |
| 无匹配 |
当用户的输入不匹配时,机器人返回的通信。 笔记:机器人返回你在设置>用户输入>未检测到匹配>不匹配道歉与 No Match 通信相结合。 |
| 自定义 “不匹配” |
启用 “不匹配重提示” 字段,使您能够创建不匹配提示的列表。 机器人在收到 No Match 输入事件后以递增方式返回这些提示。 |
| 不提示匹配内容 |
当机器人收到 No Match 输入时,它会在 No Match Repromps 集合中的位置返回通信,该位置对应于该操作收到的 No Match 输入的当前数量。 例如,第一个 “不匹配” 输入会触发机器人使用已定义集合中的第一个 “不匹配” 提示符。 No Match Reprompt 集合的长度也会覆盖您在中定义的 No Match 重试的最大次数设置>用户输入>未检测到匹配项>最大不匹配重试次数对于该特定操作。 例如,如果您在集合中定义两个重新提示,机器人将重试两次。 空集合会关闭“无匹配”重试。 笔记:机器人返回你在设置>用户输入>未检测到匹配>不匹配道歉与 No Match 通信相结合。 |
| 默认不匹配 |
启用默认的 “不匹配” 字段,并允许您定义机器人在接收 “不匹配” 输入事件后返回的单个 “不匹配” 提示。 |
|
确认模式 |
此选项控制机器人确认参与者提供的插槽值是否正确。 如果此设置在运行时评估为“始终”,并且参与者提供的值有效,根据“验证”部分中的设置,机器人将使用“确认问题”通信与参与者确认。
|
| 路径 |
注释:
|